2.3.5.3 Device Movement
Using the Kinematics function, you can create links and joints for a component and jog them later to create poses. A component with kinematics is a device at its simplest level and a robot at a more complex level.
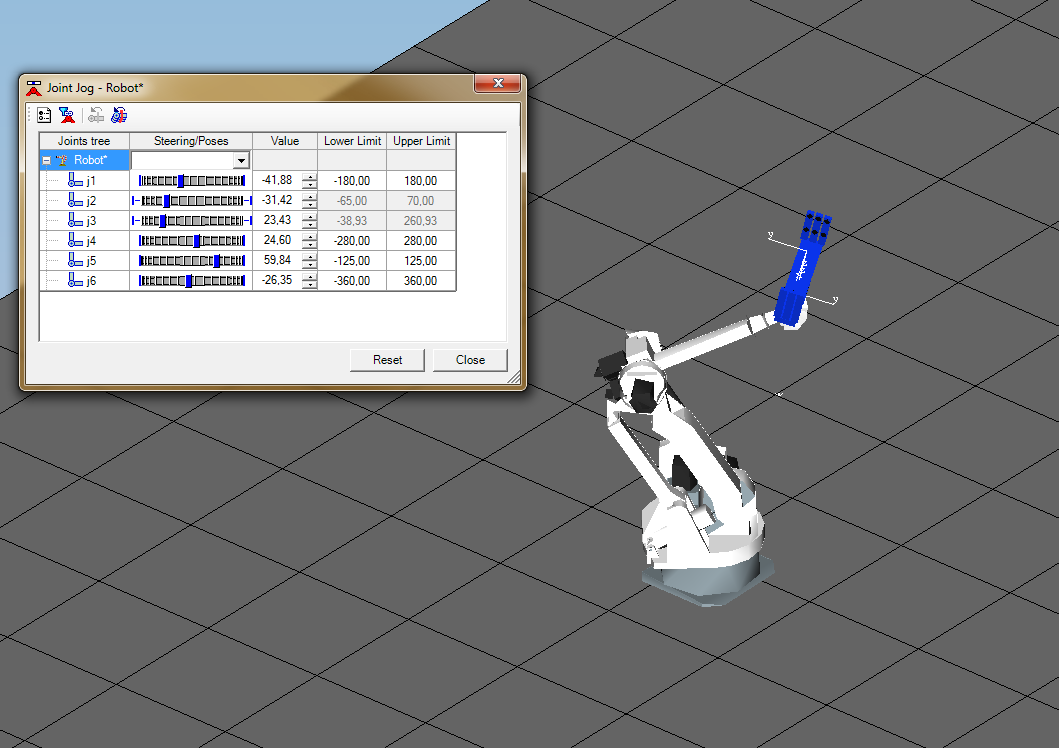
Joint Jog
The Joint Jog option enables you to move the joints of a selected device or robot, provided that its links and joints are already defined.
- Select a device or a robot, either in the Graphic Viewer or in the Resource Tree.
- Select Kinematics > Joint Jog from the menu bar to open the Joint Jog window with a list of all the joints defined.
- You can change the pose of the robot by moving the slide bar under Steering/Poses to the left or right or changing the value.
- You can change the Lower Limit and Upper Limit to configure the limit of the robot's movement.
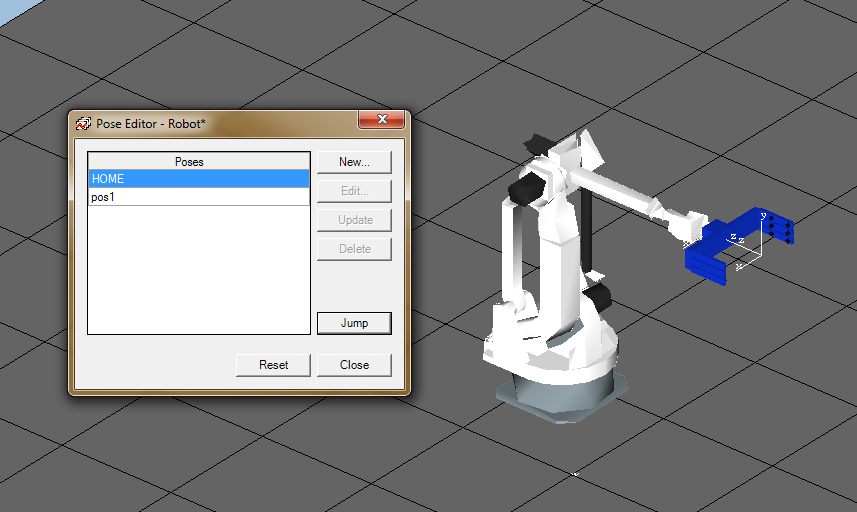
Mark Pose & Pose Editor
After you move the joints of a device or a robot with the Joint Jog option, you can save the new pose using Mark Pose option. The Mark Pose option enables you to save the current position of a device or robot as a pose. The pose is automatically save in the Pose Editor. By default, all robots or devices have a Home pose, with which you can return the robot to its original position. The saved poses are the prerequisite for creating a device operation later in Process Simulate.
- Select Kinematics > Mark Pose from the menu bar or click the Mark Pose button
 to save the current pose.
to save the current pose. - Select Kinematics > Pose Editor from the menu bar or click the Pose Editor button
 to open the Pose Editor window.
to open the Pose Editor window. - Select Kinematics > Home from the menu bar or click the Home button
 to return the robot to its original position.
to return the robot to its original position.