3.3.3.3 Reach and Place Object
The reach operation enables you to create an operation where the human model grasp an object, while the place operation enables you to create an operation where the human model place an object previously grasped in selected location. By combining both reach object operation and place object operatoin, you can create a simulation where a human model walks to a location, picks up an object, walks to another location, and place the object in another location. This is similar to the pick and place operation explained in previous chapter.
Reach Object
There are different ways to create a reach object operation in Process Simulate. The Auto Grasp option enables you to quickly create a grasp operation for a human model by selecting the target object or a target location and Process Simulate automatically sets all other conditions. The Grasp Wizard option enables you to create a grasp operation in which a human model grasps a target using a specified hand position.
- Select a human model, either in the Graphic Viewer or from the Object Tree.
- Open the Auto Grasp dialog box using one of the following steps:
- Select Human > Reach Object > Auto Grasp from the menu bar,
- Click the Auto Grasp button
 on the toolbar.
on the toolbar.
- The Auto Grasp dialog box appears with a Right Hand tab and a Left Hand tab.
- In the Object field, click the object to be grasped in the Graphic Viewer or from the Object Tree.
- Check the Allow Two Hand Grasp box to define grasp setting for both hands simultaneously. If this checkbox is selected, there is no need to define settings in both Right Hand and Left Hand tabs. Otherwise, you have to define the grasp setting for the right hand and left hand separately.
- Check the boxes Allow Human Relocation and Snap to Object to allow the human model to adjust its position when the target object is out of reach. In such case, Process Simulate creates a walk operation in addition to the reach operation.
- Click Create Op. to create a reach operation in the Operation Tree and define the parent operation, or Reset to return the human model to its original location and posture.
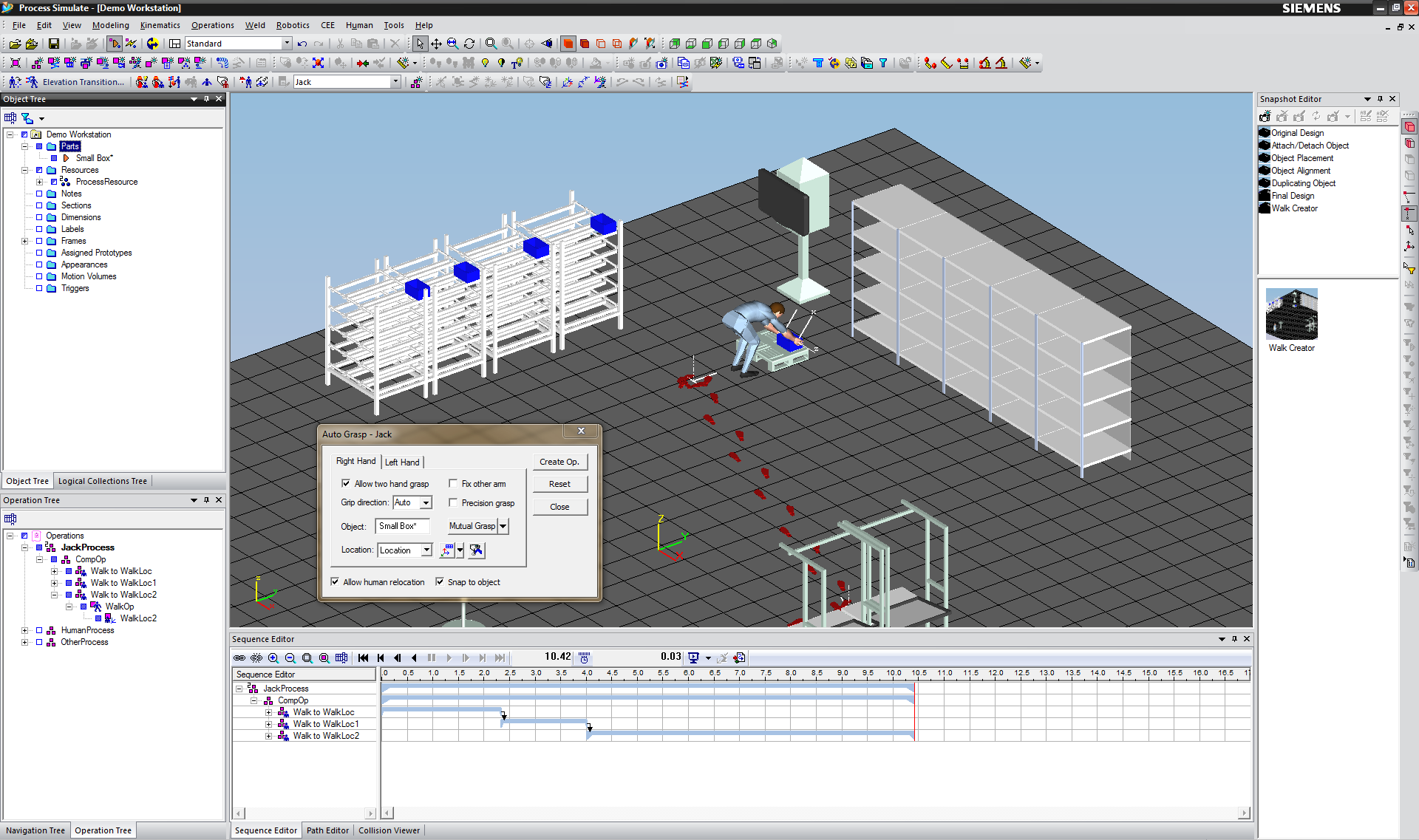
Figure: Walk and Reach Object with Auto Grasp
Place Object
The Place Object option enables you to create an operation where the human model places an object. The human model has to grasp an object first in order to place an object.
- Select a human model with a grasp posture, either in the Graphic Viewer or from the Object Tree.
- Open the Place Object dialog box using one of the following steps:
- Select Human > Place Object from the menu bar,
- Click the Place Object button
 on the toolbar.
on the toolbar.
- In the Place Object dialog box, select the object to be placed by the human model. The Placement Manipulator window opens automatically and a Manipulator Frame appears in the Graphic Viewer. Select the axis and click the Move One Step button or drag the Manipulator Frame in the Graphic Viewer to move the object.
- In the Human Position Adjustment area, choose between the following options:
- Fixed: The position of the human model is not automatically adjusted.
- Follow Object: The position of the human model is adjusted automatically when the object is out of reach.
- In the Relation to Object area, choose between the following options to define the relation between the human model and the object carried:
- Carry: The object being placed is picked up and carried by the human model.
- Follow: The object being placed is pushed ahead of the human moving (for example, a cart).
- Click the Add Object Location button to save the location in order to activate the Create Operation button. If the human model should pick up the object and walk to another location to place the object, you need to create several locations. Click the Placement Manipulator button
 or the Man Jog button
or the Man Jog button  in the Place Object dialog box, manipulate the location of the object or the human model, and click the Add Object Location button again to add another location.
in the Place Object dialog box, manipulate the location of the object or the human model, and click the Add Object Location button again to add another location. - If you want to create a release grasp event for the selected object, check the Release Object at the End of Operation box.
- Click Create Op. to create a place object operation in the Operation Tree or Reset to return the object and the human model to the original position.
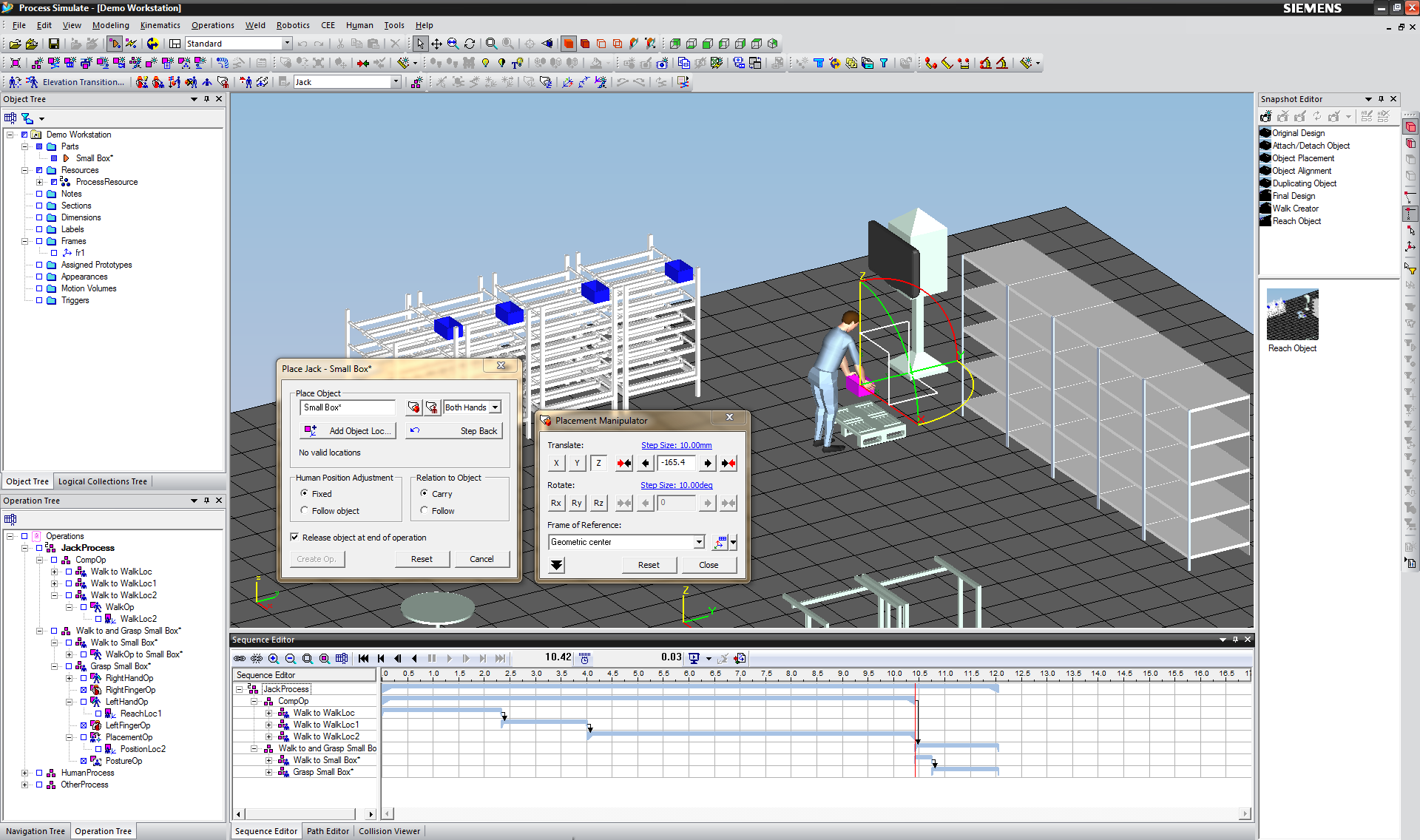
Figure: Place Object Dialog Box with Placement Manipulator
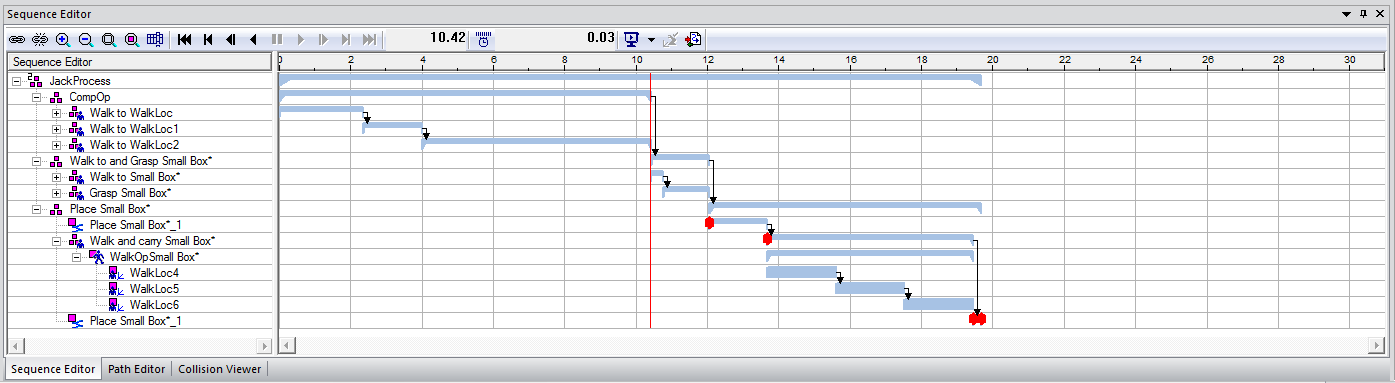
Figure: Walk, Reach, and Place Object Operation in Sequence Editor