3.2.2.1 New Pick and Place Operation
A pick and place operation enables you to move an object from one place to another place using a robot with a gripper. You can create a new pick and place operation using one of the following steps (if the options are not available, select a robot first either in the Graphic Viewer or from the Object Tree):
- Select Operations > New Operation > New Pick and Place Operation from the menu bar,
- Click the New Pick and Place Operation button
 from the toolbar.
from the toolbar.
The New Pick and Place Operation dialog box with several fields and options appears. Typically, the name of the selected object will appear in the Name field. By default, all new pick and place operations are named PNP_Op#. You can give the operation a different name if you wish to. For this example, rename the pick and place operation to Robot1_PNP_Op1.
After you click on the robot, the name of the robot will appear in the Robot field. If a gripper is already mounted on the robot, Process Simulate will recognize the Gripper automatically. Click the Scope dropdown list to select the Operation Root to be the parent for the new pick and place operation. Alternatively, you can also select other compound operation in the Operation Tree as the parent operation. In this example, we use the Robot Operation created in Process Designer as the parent operation scope.
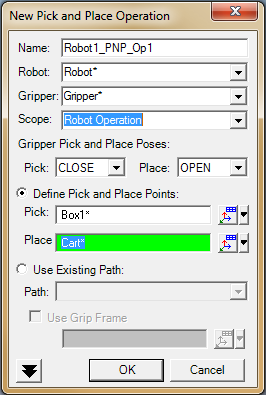
Figure: New Pick and Place Operation Dialog Box
There are two ways to define the locations of the pick and place operation.
- Select Define Pick and Place Points to define a new path for this operation. Specify the start and end points by clicking in the Pick and Place fields and selecting the location in the Graphic Viewer respectively.
- Select Use Existing Path if you already have a path defined previously.
For this example, choose the Box 1 as the pick point and choose the Cart as place point. After you click OK, the following occurs:
- A new pick and place operation PNP_Op is created with a Pick operation and Place operation as its children operations and displayed as hierarchy in the Operation Tree.
- A path is created between the specified start point (pick) and end point (place) and displayed in the Graphic Viewer.
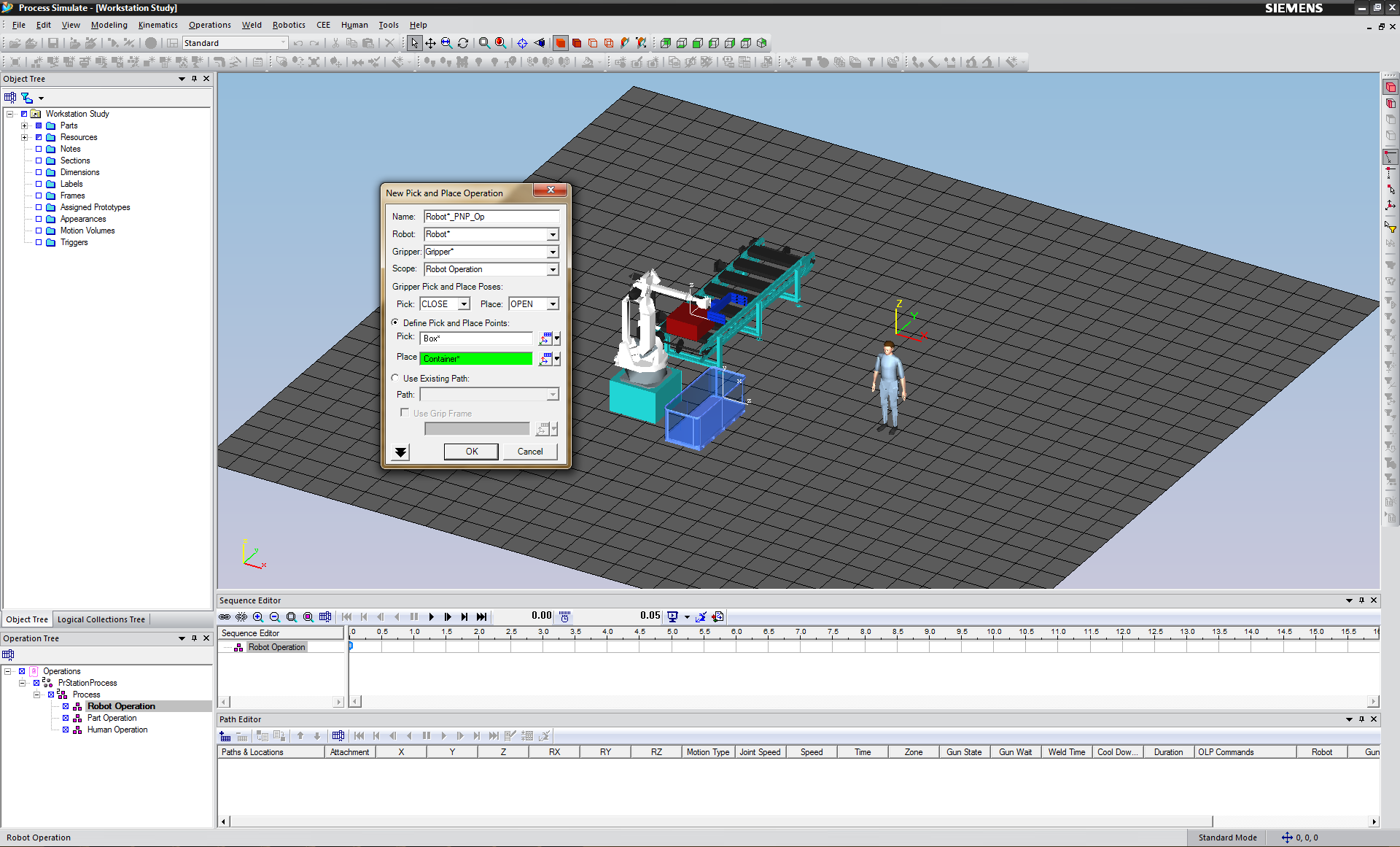
Figure: Pick and Place Operation
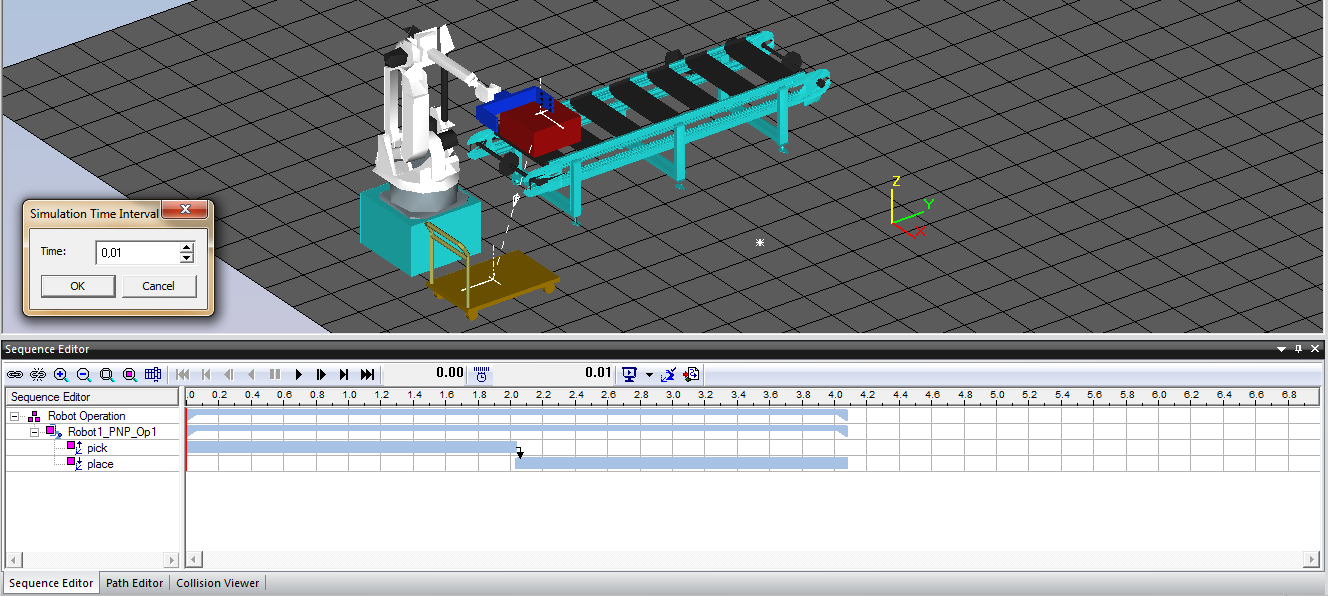
The new pick and place operation should be automatically set as Current Operation. Otherwise, select the new pick and place operation or the compound parent operation in the Operation Tree and set the operation as current operation. Drag and drop the pick and place operation in the Sequence Editor as shown in following figure.
Click on play to see what happens. You can also adjust the Simulation Time Interval by clicking the Set Time Interval button ![]() . Did the pick and place operation run successfully? Did the robot move without colliding with another objects?
. Did the pick and place operation run successfully? Did the robot move without colliding with another objects?