3.3.4.2 Envelopes
With the Maximal Grasp Envelope option, you can display the maximum range, within which the human model can perform grasp and reach operations, in the Graphic Viewer. The maximal grasping range is displayed as half ball with blue color, surrounding the human model. This option is useful, for example if you want to quickly determine whether the object to be grasped is located within the grasping range of the human model. The Maximal Grasp Envelope can be displayed by selecting a human model, either in the Graphic Viewer or from the Object Tree, and selecting Human > Envelopes > Maximal Grasp Envelope from the menu bar.
With the Vision Envelope option, you can display the range or field of vision of the human model in the Graphic Viewer. The field of vision is displayed as a cone with yellow color, beginning from the face/eyes of the human model to the maximum vision range. The Vision Envelope can be displayed by selecting a human model, either in the Graphic Viewer or from the Object Tree, and selecting Human > Envelopes > Vision Envelope from the menu bar.
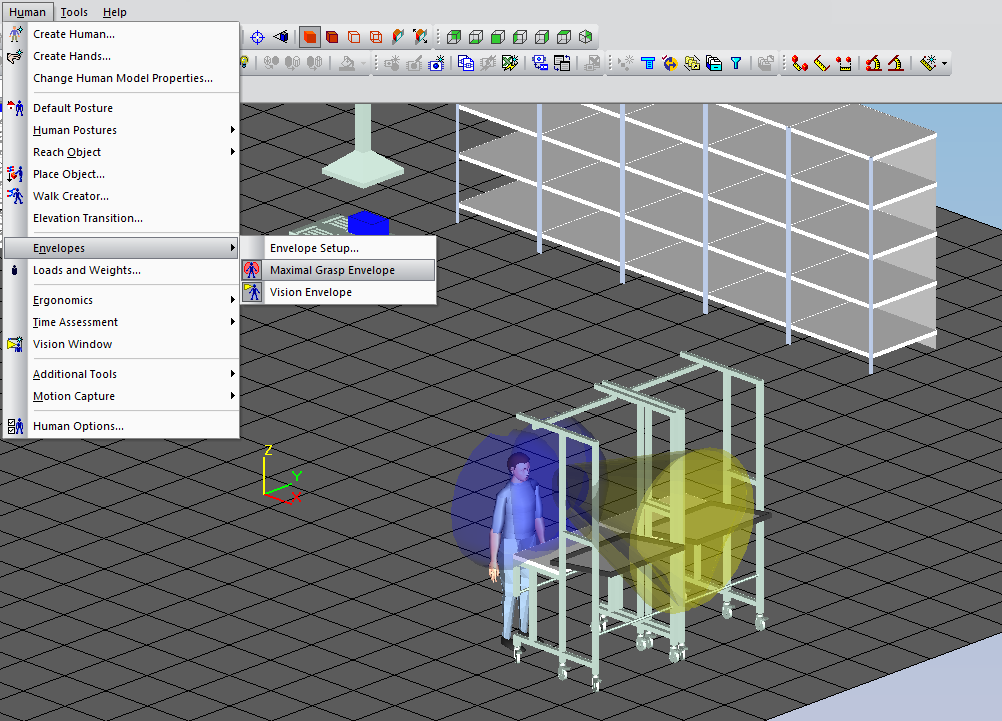
Figure: Human Model with Maximal Grasp Envelope and Vision Envelope
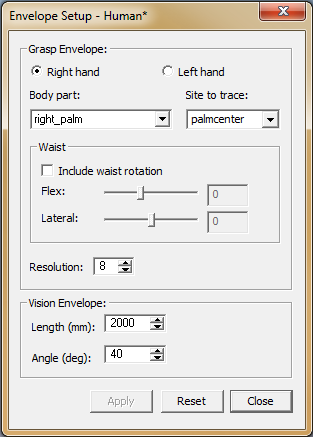
The Envelope Setup option enables you to define how to graphically display the vision and grasp range of the human model. Each human model can have a different envelope definition. To define the envelope of a human model:
- Select a human model, either in the Graphic Viewer or in the Object Tree.
- Select Human > Envelopes > Envelope Setup from the menu bar to open the Envelope Setup dialog box.
- Define the parameter of the envelope. For example, you can define the maximal length and angle of the vision envelope, and click Apply.