3.2.3.2 Operation Dependency
The pick and place operation Robot1_PNP_Op1 (or its parent operation Robot Operation) and the object flow operation Box1_Op1 (or its parent operation Part Operation) are currently two independent operations that can only be loaded and played separately in the Sequence Editor. You can only run the simulation of both operations, if you set the parent compound operation Process 1 as the current operation.
In case that both operations do not belong to the same parent compound operation, you need to create a compound operation first that will act as parent operation.
- Hold the CTRL button and select both operations simultaneously.
- Right-click and select Group to Compound from the context menu.
- A new compound operation appears as the parent operation of both operations that you previously created appears. By default, all new grouped compound operation will be named Seq#. You can change the name of the operation if you wish.
- You can undo this option anytime by selecting Ungroup from Compound from the right-click context menu.

After you created a new compound operation as parent operation, you can set it as current operation in the Sequence Editor. In this example, we already have the Process 1 as parent operation of the pick and place operation Robot Operation (Robot1_PNP_Op1) and the object flow operation Part Operation (Box1_Op1). Set the parent operation as current operation and play the simulation in the Sequence Editor to see what happens. As you can see in the following figure, both operations run simultaneously. This results in the robot grasping at nothing while the Box 1 still moves on the Conveyor.
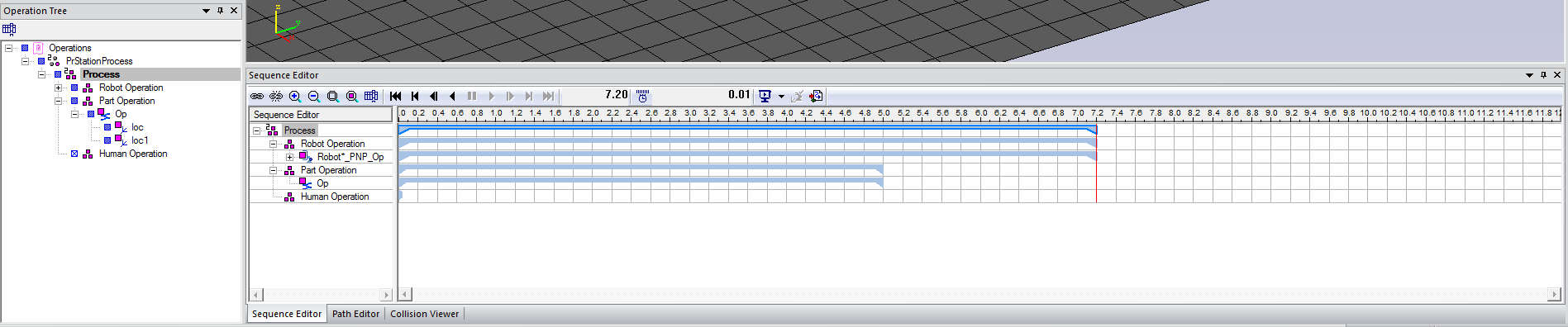
Figure: Sequence Editor with Both Processes
To arrange the sequence of both operations in right order, you need to create dependency between both operations first by following these steps:
- While holding the CTRL button select the Part Operation first and then the Robot Operation so that both operation are simultaneously highlighted.
- Click the Link button
 in the Sequence Editor.
in the Sequence Editor. - An arrow appears and links the Part Operation to the Robot Operation. The start of the pick and place operation Robot Operation moves after the end of the object flow operation Part Operation.
For a better overview you can reorder the operations in the hierarchy tree in the Sequence Editor, so that the Part Operation resides below the Robot Operation. Click Play and watch what happens. As you might see, the robot now waits until the Box 1 has reached its end position.

Figure: Sequence Editor with Right Sequence Order
Process Simulate can also help you to optimize the overall process time. In this case, it can be shortened by overlapping the robot's movement (pick and place operation) with the movement of the Box 1 (object flow operation). To manually adjust the operations you have to unlink the operations first by clicking the Unlink button and then dragging the start of the pick and place operation Robot1_PNP_Op1 (or its parent operation Robot Operation) to the left, so that it overlaps the object flow operation Box1_Op1 (or its parent operation Part Operation) in the timeline. Try to find the shortest possible time by adjusting the sequence of the pick and place operation and test your result.