3.2.2.3 Collision Viewer
The Collision Viewer can display collision between objects and determine the overlapping between objects. The Collision Viewer is an essential tool for planning and optimizing the assembly process. You can use the Collision Viewer to check the feasibility of the operations planned and to ensure that the process is collision-free. For example, if you have a cooperative work between human and robot without any separating wall, you need to make sure that the robot's path does not overlap the human's movement path for security purpose.
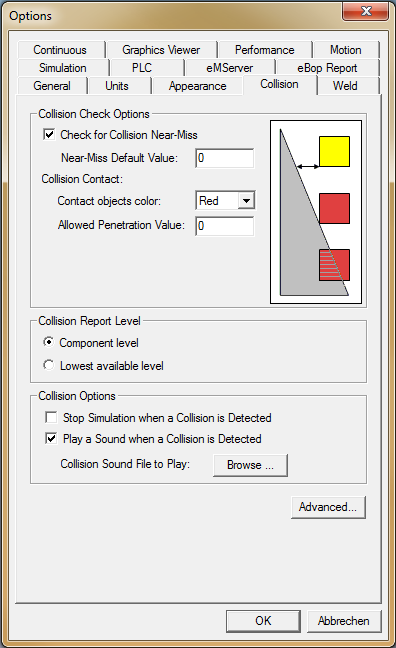
If the Collision Viewer is not displayed the first time you open Process Simulate, select View > Viewers > Collision Viewer from the menu bar to display the Collision Viewer. By selecting Tools > Options from the menu bar, you can view the settings of the Collision Viewer under the Collision tab and make any adjustments. Available settings are:
- Collision Near-Miss to select whether a near-miss collision should be displayed. You can enter any value in the Near-Miss Default Value field.
- Collision Contact to define the color and allowed depth of overlap between objects in contact.
- Collision Options to select whether the simulation should be stopped and whether a sound is played in the event of a collision.
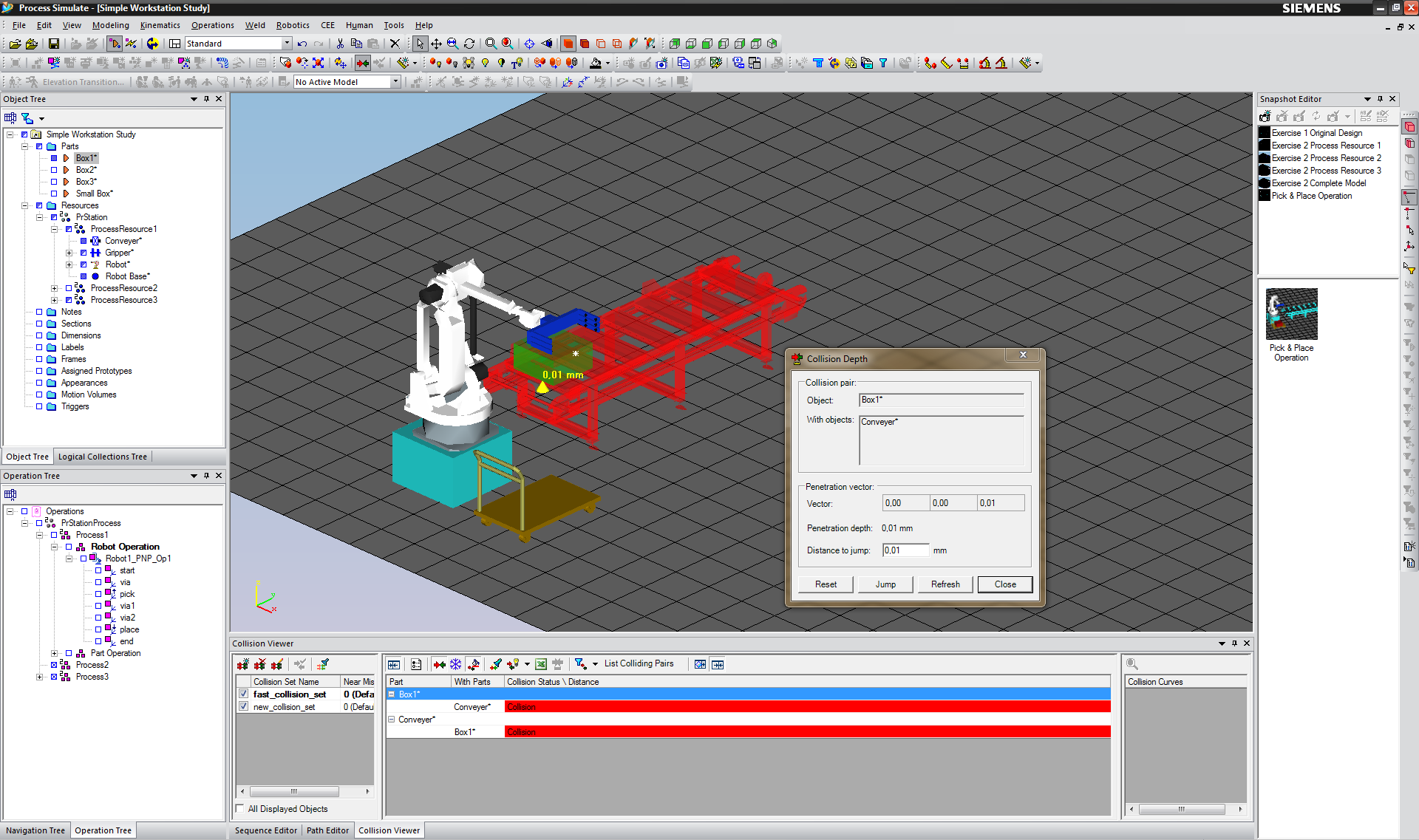
The Collision Viewer in Process Simulate works in the same way as the Collision Viewer in Process Designer. By checking the box All Displayed Objects in the Collision Viewer, you can quickly view all collisions between objects loaded in Process Simulate. Try to analyze the collision of the pick and place operation Robot1_PNP_Op1, which you created before, and make sure that neither the robot nor the Box 1 collides with the Conveyor or the Cart using the Collision Depth Analysis.